Как сделать луноход на радиоуправлении
Вездеход «Луноход-1»

Этот вездеход может перевозить до четырех пассажиров с грузом. Так же машина хорошо держится на плаву и способна преодолевать речки и пруды. Особое внимание при строительстве автор уделял весу вездехода. В итоге получилась очень легкая машина, что продемонстрировано на видео ролике в конце статьи.
Материалы и агрегаты задействованные для создания этой машины:
1)Двигатель от мотоцикла сузуки 250 куб с водяным охлаждением.
2) реверс редуктор
3) насос НШ 100
4) шестерни и вал от трактора Т-25
5) профильная труба
6) кузов от трактора
7) шестерни и вал от трактора т-25
8) звезды на 15 зубов и меньше
Рассмотрим более подробно конструкцию вездехода.
Мосты были жестко прикреплены к раме вездехода. Давление в колесах варьируется от 90 до 120 по тонометру в зависимости от дорожных условий.


Корпус вездехода сделан из дюралюминия, и был взят от трактора. была слегка модернизирована конструкция насоса масляного нш-100.
Были использованы шестерни и вал от трактора т-25, из которых и выполнена конструкция. В корпусе присутствуют два отверстия, из которых выходит вал к переднему карданному валу и назад к заднему. По бокам находятся две крышки, в одной из которых есть ручка для переключения вперед, назад и нейтралки. К другой крышке идет вал со звездой.
Более подробно о двигателе вездехода: четырех тактовый с водяным охлаждением, четырьмя цилиндрами объемом 250 кубических сантиметров. Так же в комплекте есть электро-стартер и реверс редуктор, который позволяет переключать 6 передач вперед и назад.





Задняя стенка кузова может быть опущена на тросах параллельно земле, что позволяет перевозить длинные грузы, например бревна. основную часть работ вездеход выполняет на трех первых передачах, при этом на третьей передаче по ровной поверхности разгоняется до 60 километров час. Так как у вездехода отсутствует кабина, то ехать быстрее опасно и неудобно.
В будущем планируется установка рессор и амортизаторов для смягчения ударов на высоких скоростях.
При нагрузке вездехода в четыре пассажира, водитель и небольшой груз, машина погружается чуть выше пола кузова.
На двигатель была одета максимально малая звезда, а так же реверс понижает и сделано понижение на мостах вездехода.
Хотя все равно скорость довольно высокая и возможно в будущем будет установлен вариатор вроде сафари.
Так же автор решил убрать стандартный карбюратор, так как он предназначен для стационарного режима работы. А в вездеходе используется переменный режим.
Автором была использована подобная схема:

Был установлен тормозной барабан, который достаточно виден с левой стороны от реверса. Колодки с механизмом пока не нуждаются в установке.
При посадке гильзы в цилиндр, гильза в самом низу посадки срезает стенки цилиндра либо при отливке цилиндра остается облой, края которого направлены к поршню и заходят в гильзу, поэтому на юбке поршня можно увидеть царапины, хотя двигатель статичен.
Так как облой местами держится весьма слабо и кусочки падают в поддон, то пришлось удалить их пинцетом, во избежание трения поршня.
Рассматривается еще и подобный способ модернизации: взять мост и полторы главной передачи от классического ваза. затем большие шестерни приварить к валу и одеть два подшипника на этот вал. На концах вала сделать шлицы и крепление карданных валов. Корпус конструкции можно сделать из трубы или чулка от классического ваза. В итоге получится вал, который имеет ход прямо в подшипниках, к которому подводится либо левая либо правая шестерня, которые отвечают за перед и зад, по середине же конструкции будет нейтральная передача.
Еще несколько фотографий конструкций:


При испытаниях было замечено следующее, после установки на вал звезды на 15 зубьев, стало барахлить сцепление. двигатель работает штатно, а вот сцепление греется и буксует, вероятно оно не рассчитано на тяжелую технику. Поэтому автор звезда была заменена, а в сцепление укорочены пружины и увеличены грузики. После данных махинаций вездеход снова стал работать нормально.
Единственный минус, это то, что с малой звездой едет вездеход не особенно. пришлось отстегнуть тягу и пружинку от краба, временно подсоединить проволоку, после чего обороты снова появились, и двигатель стал работать лучше.
Минус центробежного сцепления в том, что вездеход выдает мощь только на высоких оборотах двигателя. то есть только на большой скорости, а в лесу или на сложных участках трассы, когда скорость весьма невысока, становится тяжело. Все же механическое сцепление с коробкой лучше и более универсально в этом плане. Для улучшения проходимости на низких оборотах автор решил переставить тягу регулятора, так как с ним холостые обороты держатся лучше. а так же схема будет продублирована механическим приводом.
Возможно причина проблем кроется в малом диаметре дисков сцепления, именно по этой причине диски и могут нормально прижиматься только на высоких оборотах. На маленьких же оборотах диски прижимаются неплотно, от чего и происходит пробуксовка. Если причина именно в этом, то даже грузики не помогут, так как сцепление просто не предназначено для подобного типа техники. Вариатор тоже не сможет решить проблему. скорее всего автору придется заменить сцепление, но пока он решил установить шкивы с ремнем натяжителем, котоые позволят использоать весь диапозон оборотов двигателя, а так же нужнуу скорость.
Фотографии готового вездехода:



Автор вездехода с ником «comer» на лунаходах.нет из города Санкт-Петербург
Полноприводный вездеход на радиоуправлении

Если вы хотите, чтобы ваш ребенок разбирался в электронике и механике, не покупайте для него игрушки, делайте их сами! А еще лучше, если вы будете их делать вместе со своим ребенком. Сегодня можно купить или даже простой найти почти бесплатно огромное количество запчастей для игрушек, это и различные двигатели, редукторы, электроника для управления, светодиоды и многое другое. При желании вы можете соорудить настоящий шедевр, который не то, что нужно покупать, а даже у вас его захотят купить!
В этой инструкции я вам расскажу, как сделать простейший вездеход. Машинка имеет полный привод, причем дифференциалов тут нет, вращаются все 4 колеса одновременно, это делает ее очень проходимой. Что касается крутящего момента, то, не смотря на то, что моторчики тут самые обычные на 5В, они используются совместно с хорошими редукторами. Всего в машинке используется 3 двигателя с редукторами, один на задней оси, один на передней, а еще один двигатель используется для рулевого управления, но его можно заменить серводвигателем при желании. Из самого дорогого, что понадобится найти или купить – это электроника для управления. Но при желании даже ее можно сделать самому. Итак, приступаем к изготовлению.
Материалы и инструменты, которые использовались автором:
Список материалов:
— два двигателя с редукторами (можно найти в старых игрушечных машинках);
— 4 колеса подходящего диаметра (лучше побольше);
— пластик или что-то подобное (для изготовления рамы);
— электроника для управления ;
— моторчик с рулевым редуктором;
— аккумулятор;
— выключатель;
— две пружинки и шпильки для волос;
— винтики, гайки и прочие мелочи.
Процесс изготовления вездехода:
Шаг первый. Делаем раму
Для изготовления рамы можно использовать листвой пластик или что-то подобное. Самое главное – чтобы материал был прочным и легким. Запросто подойдут некоторые строительные материалы, предназначенные для отделки. Можете сделать раму точно такой, как у автора, но это не обязательно и зависит скорее от того, какого размера будет устанавливаемая электроника, аккумулятор и так далее. Пластик режем на нужные куски, а потом склеиваем. По максимуму используем суперклей, так как он почти ничего не весит, в отличие от горячего клея.






Шаг третий. Устанавливаем заднюю ось
Заднюю подвеску автор решил сделать на амортизаторах, но это делать вовсе не обязательно, ведь пассажиров в машине не будет, а на проходимость это вряд ли повлияет. Единственный плюс – это интересный внешний вид, что заставит вызывать зависть у сверстников.
Сперва крепим задний редуктор, для этого автор использует самодельную вилку. Вилка крепится к раме подвижно, используя винты с гайками. В итоге вы должны получить двигающуюся в вертикальном положении заднюю ось.




















Шаг шестой. Приступаем к сборке
Теперь вам осталось установить контроллер, который будет управлять двигателями при подаче радиокоманды. Припаиваем нужные провода в соответствии с инструкцией к контроллеру и хорошенько его прячем от попадания воды и пыли, желательно изготовить отдельный корпус. Еще нужно установить аккумулятор, его подключаем через выключатель, чтобы он не разряжался, когда игрушкой не пользуются.
Как сделать самому Луноход
Если в детстве у тебя не было велосипеда, а теперь у тебя Бентли,
то всё равно в детстве у тебя велосипеда не было.
Так уж получилось, что в моём детстве не было Лунохода. А тут ещё и ребёнок родился. В общем, я подумал, и решил сделать игрушку нам обоим.
Создавать точную копию не хотелось, да и не умею я печатать корпуса дома, поэтому решил ограничиться воссозданием похожей функциональности. Кроме того, мне показалось негуманным вводить «программу» движения по памяти и не понимать, что именно получилось ввести, поэтому добавил дисплей.
Версия 1

Под рукой было недорогое шасси с Ebay и Arduino Uno.

Для управления моторчиками я взял PWM Servo Shield и на макетной плате спаял L293D + PCF8574:

Для считывания с клавиатуры взял PCF8574 и горсть диодов:

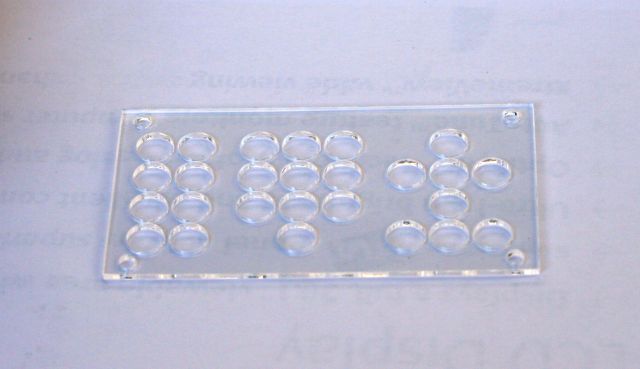
Саму клавиатуру сделал печатной платой:

Дабы клавиатура не разваливалась в руках, закрепил сверху накладку. Её пришлось заказать у «фрезеровщиков» 🙂
Для отображения программы используется обычный дисплей 20 на 4 символа. Да, тоже через PCF8574 😉
Для питания сначала использовал 4 батарейки, но они слишком быстро садились, и я заменил их на пару аккумуляторов 18650:

Для зарядки использовал модули TP4056, которые присоединил через реле к аккумуляторам, правда, не очень успешно.
Быстрее всего получилось написать прошивку. К сожалению, оказалось, что библиотека I2C LCD имеет лицензию GPL, и код отправился в корзину. Примерно тогда же я понял, что Arduino Uno не самый удачный вариант, и что горсть PCF8574 очень неудобно паять.
И я решил начать сначала.
Версия 2

Учёл предыдущий опыт, который подсказывал, что есть несколько проблем:
Железо
Клавиатуру я перенёс на печатную плату (пожалуй, это единственный сложный для повторения элемент). Накладку на клавиатуру мне отфрезеровали на заказ.
Оставался вопрос: из чего же сделать шасси? Пластика подходящего не было, металл тяжело обрабатывать… А если взять фанеру? «Но это же не эстетично!», подумал было я. Но когда через полчаса я получил нормальное шасси, то изменил мнение. Шасси было не очень презентабельно и отправилось в корзину, но скорость обработки так понравилась, что я решил и дальше использовать фанеру.
Правда, второй лист я начал пилить только после того, как нарисовал примерный план:

Для крепления моторов отрезал кусок алюминиевого уголка и высверлил:

Платы закрепил на шестигранных стойках и соединил между собой шлейфами.
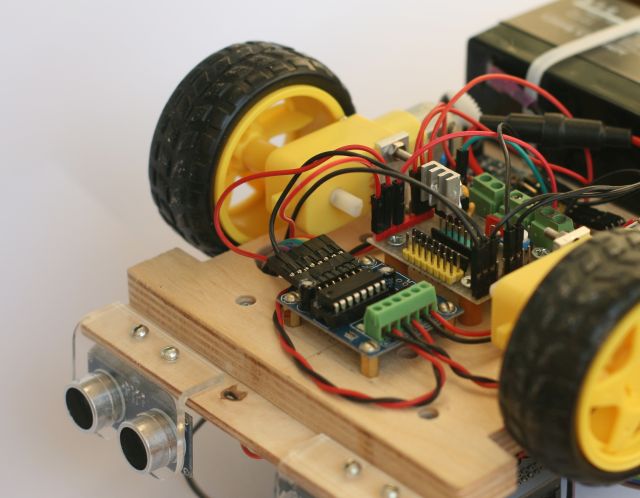
(здесь же можно заметить стабилизатор на 5В и немного контактов питания).
Проводов питания оказалось многовато, поэтому я сделал из stripboard плату питания (подробности здесь). Подозреваю, что можно взять обычный sensor shield, у которого выводов питания с избытком.

Так как расширителей ввода-вывода больше не было, клавиатуру пришлось переделать (исходники). Я перенёс на неё диоды и резисторы подтяжки:


В качестве датчика оборотов использовал щелевую оптопару и шестерню (раскрасил её перманентным маркером):

В качестве третьего колеса использовал шарик:
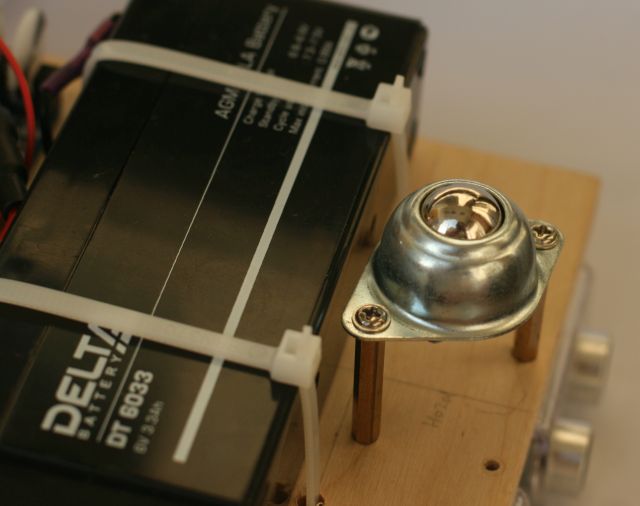
Изначально там была опора в виде колёсика на коромысле, которая шла вместе с шасси. Однако при изменении направления движения колёсико начинало разворачиваться в самый неожиданный момент и тележку бросало в сторону.
Схема соединений
Лучше всего посмотреть файлы consts.h и lcd.ino, они содержат самую актуальную информацию. Соединения, как они есть сейчас, выглядят так: 
Картинка кликабельна.
Прошивка
Прошивка, по сути своей, представляет обыкновенную программу, написанную в Arduino IDE. Режимов работы два: редактирование и выполнение. В процессе редактирования с клавиатуры принимается команда + количество повторений. Всё это упаковывается в 16-битное значение и складывается в массив в RAM. При выполнении программы из массива выгребаются значения и выполняются. Выполнение одного шага (в очень упрощённой форме) выглядит так:
Пройденный путь определяется по количеству импульсов с оптопары, которая проверяется в прерывании таймера.
К сожалению реальный мир несколько отличается от программной модели, на которую рассчитана прошивка, поэтому я добавил некоторое количество задержек, которые позволяют учесть инерцию шасси.
Я сознательно поставил MIT-лицензию. В моём понимании прошивку с такой лицензией можно свободно использовать как угодно, без необходимости публиковать дальнейшие изменения (не хочу никого ни к чему принуждать).
Руководство по эксплуатации 😉
Клавиатура слегка отличается от «классического» Лунохода:

Команда «Повтор» содержит один параметр: сколько шагов нужно повторить [один раз]. Пример: Fwd1, Pause1, Bwd1, Loop3; в результате команды Fwd1, Pause1, Bwd1 будут выполнены два раза. Первый раз потому, что они есть в программе, второй — потому что так указано в команде «Цикл».
На всякий случай контролируется заряд аккумулятора. Если он слишком мал, то выводится предупреждение и игрушка не едет.
Держать в голове всю программу тяжко, поэтому я прикрутил простейший индикатор, на котором дублируется вводимая информация.
После запуска отображается приглашение:

При вводе команды в левом верхнем углу отображается значок команды и количество повторений:

Если введено больше одной команды, снизу будет список (по сути, программа), а сверху всё так же будет отображаться вводимая команда:

Почему получилось именно так
Игрушка создавалась из того, что было под руками или легко достать. Отдельно хочется сказать про Arduino. Она выбрана по нескольким причинам:
Что можно улучшить
Шасси. При резком старте колёса «шлифуют» и игрушка сбивается с курса. Можно попробовать сделать шестиколёсное шасси, или вообще гусеничное (на Aliexpress есть, но я пока не пробовал).
GUI. Сейчас на индикатор выводится только минимальный объём информации, и делается это самым простым способом.
Код. Пулитцера я точно не получу.
Звук. Есть дешевые и очень мелкие mp3-плееры. Можно смело выкинуть ЦАП R-2R и заменить его на готовый плеер.
Резервные кнопки. Можно сделать запись готовой программы в EEPROM, чтобы она не терялась при выключении питания. Реализация может быть как в магнитолах: при длинном нажатии программу сохраняем, при коротком — запускаем.
Кнопка Out. На данный момент не реализована. Можно прикрутить что-то типа реле/сервы к одному из выводов Arduino.
Благодарности
Неудачные дубли
Мне нравятся фильмы с Джеки Чаном, потому что в конце есть нарезка неудачных дублей. У меня без них тоже не обошлось. Больше всего меня удивил тот факт, кто круглое сверло с двумя канавками даёт треугольное отверстие 😉