Как сделать искусственные мускулы
Сделай сам: синтетические мышцы из лески и нитки
Как изготовить искусственные мышцы из рыболовной лески
Исследователи из Техасского университета в Далласе (США) представили синтетические мышцы, которые в 100 раз мощнее настоящих мышечных волокон той же длины и массы.
При этом сама технология изготовления оказалась на удивление простой. Для искусственных мышц не понадобилось никаких изощрённых синтетических полимеров: Рэй Бофман (Ray Baughman) и его коллеги просто взяли полимерную нить из тех, которые используют для производства рыболовной лески или синтетических ниток, и скрутили её в спираль. Эта спираль при перемене температуры могла скручиваться и растягиваться. Любопытно, что техпроцесс можно было поменять и так, чтобы эффект был обратным, то есть чтобы нить при остывании скручивалась, а при нагреве растягивалась. Варьируя число нитей в пучке, можно добиваться иных механических характеристик искусственного «мышечного волокна».

Синтетические волокна, сделанные из шести нитей разной толщины:
верхнее сложено из ниток толщиной в 2,45 мм, нижнее – из ниток толщиной в 150 мкм.
(Фото авторов работы.)
И характеристики эти воистину впечатляют. Во-первых, по сравнению с обычными мышцами, которые могут сокращаться лишь на 20% от своей длины, искусственные способны уменьшаться наполовину. Быстрого утомления такие мышцы, разумеется, тоже не знают. Если объединить вместе сотню элементарных волокон, то такая мышца сможет поднять больше 700 кг. Относительно веса волокна могут развивать мощность в 7,1 л.с. на кг, что соответствует, по словам исследователей, мощности реактивного двигателя.
Двигателем же для них, как уже сказано, служит перепад температуры, обеспечить который можно как угодно – хоть с помощью химической реакции, хоть посредством электричества (да хоть своим дыханием грейте эти волокна). Что же до самих волокон, то учёные особенно напирают на исключительную простоту их изготовления: дескать, любой студент сделает такое во время обычной лабораторной, главное – соблюсти физические условия, при которых вы будете деформировать нить. Гениальность же авторов идеи в том, что им удалось в этой тривиальной полимерной конструкции угадать огромный физический потенциал.
Собственно, простота этих мышц, наверное, мешает вот так сразу оценить всю революционность изобретения. Хотя исследователи, разумеется, продемонстрировали возможное его применение: приспособленные к окну, они закрывали и открывали его в зависимости от окружающей температуры. Кроме того, из волокон удалось создать тканую материю, пористость которой опять же менялась в зависимости от температуры, а отсюда легко представить себе «умную» одежду, которая будет сама проветривать вас в жару и экономить тепло в холод.
Но, конечно, львиная доля фантазий вокруг и около искусственных мышц отдана робототехнике. Понятно, что такие волокна могут стать прямым аналогом человеческих мышц у роботов, с помощью которых те смогут даже менять выражение лица. Синтетические мышцы пригодятся как при поднятии тяжестей, так и при выполнении тонких хирургических манипуляций (если мы представим себе медицинские аппараты будущего).
В прошлом такие волокна пытались делать из углеродных нанотрубок. По словам Рэя Бофмана, который прошёл и через этот этап, эксперименты с нанотрубками были успешными, но, во-первых, такие «наномышцы» очень сложны в изготовлении и чрезвычайно дороги, а во-вторых, они сокращались всего на 10% от своей длины, то есть уступали даже обычным живым мышцам, не говоря уже о только что явленных полимерных волокнах.
У нас же есть пока только один вопрос, который касается эффективности и экономичности: сколько тепла (и, следовательно, электрической или химической энергии) нужно потратить на их механическую работу? Авторы признаются, что, как и вообще все искусственные мышцы, их волокна в этом смысле не отличаются особой эффективностью, однако есть определённые надежды, что в этом случае оптимизировать энергетические затраты получится довольно быстро.
Результаты исследования опубликованы в журнале Science (Haines et al., Artificial Muscles from Fishing Line and Sewing Thread).
Подготовлено по материалам Техасского университета в Далласе: Researchers Create Powerful Muscles From Fishing Line, Thread.
Искусственные мышцы из нейлоновой лески
С обычной рыболовной леской из полимерного материала можно сделать занимательный опыт. Если вытянуть леску в длину и, зажав один конец, долго закручивать другой вокруг своей оси, то на леске образуются плотные кольца и она приобретает вид спиральной пружины. При нагревании эта пружина сокращается, а при охлаждении – удлиняется. Сборная команда новосибирских школьников исследовала свойства такой «искусственной мышцы» на Международном турнире юных физиков IYPT-2015. Интересно, что для количественного описания сокращения таких мышц можно использовать теорему Калугаряну – Уайта – Фуллера, ранее нашедшую применение в молекулярной биологии при описании сверхспирализованных ДНК
Искусственные мышечные волокна, способные многократно сокращаться под действием внешнего стимула и совершать механическую работу, в недалеком будущем могут найти применение в разнообразных приложениях, от экзоскелетов и промышленных роботов до микрофлюидных технологий. Разработки и исследования искусственных мышц ведутся по разным направлениям – металлы с памятью формы, электроактивные полимеры, жгуты из углеродных нанотрубок. Совсем недавно группа исследователей предложила использовать в качестве недорогих и весьма эффективных искусственных мышц спирали, свитые из обычной рыболовной лески (Hainеs еt al., 2014). Такая искусственная мышца заметно сокращается при нагревании и вновь удлиняется при охлаждении. Изготовить спиральную мышцу из нейлоновой лески и исследовать ее свойства было предложено участникам Международного турнира юных физиков IYPT-2015 в задаче «Искусственная мышца».
Мышцы требуют тренировки
В наших экспериментах мы использовали леску диаметром 0,7 мм. Чтобы свернуть ее в спираль, мы закрепили электродрель в вертикальном положении, зажали один конец лески в патроне, а к другому концу прикрепили груз весом 3 Н – при таком весе леска не порвется, а свернется в однородную спираль. В процессе закрутки груз должен подниматься вверх, не проворачиваясь вокруг вертикальной оси, для чего на него устанавливается фиксатор.

Когда продольные волокна на поверхности лески завиваются примерно на 45° по отношению к продольной оси, леска начинает скручиваться в плотную спираль. Исходный отрезок лески длиной 1 м при скручивании превращается в 17 см такой спирали. При этом нейлон претерпевает столь сильную пластическую деформацию, что после снятия вращающего усилия спираль почти не раскручивается обратно. В принципе это новое состояние волокон можно закрепить, медленно нагрев леску до температуры, близкой к температуре плавления, а затем охладив ее.
Во избежание раскручивания спирали при последующих испытаниях мы составляли искусственную мышцу из двух спиралей с правой и левой завивкой, скрепляя их параллельно. Снизу к вертикально подвешенной мышце крепился поднимаемый груз. Для сокращения мышцы на ее верхний конец по трубке подавалась горячая вода, которая свободно стекала по спиралям вниз. Температура мышцы измерялась закрепленным на ней термодатчиком, удлинение – ультразвуковым датчиком перемещения.
Работа, совершаемая двигателем по перемещению груза против постоянной действующей силы, равна произведению величины силы и перемещения. Например, при перемещении свободно подвешенного груза весом 10 Н вверх (т.е. в направлении, противоположном вектору силы тяжести) на 0,03 м подъемник совершает работу 10 Н × 0,03 м = 0,3 Дж.
Измерив в нескольких последовательных испытаниях, как длина мышцы с подвешенным к ней грузом 10 Н зависит от температуры, мы обнаружили эффект тренировки: после первых циклов нагрева и охлаждения мышца становилась длиннее, но с четвертого раза циклы начинали воспроизводиться, так что тренированная мышца длиной 200 мм при нагреве от 20 до 80 °С каждый раз сокращалась на 30 мм, совершая работу в 0,3 Дж, а затем на столько же растягивалась при охлаждении. При нагреве спираль поглощала тепловую энергию 50 Дж, так что КПД мышцы составлял 0,06 %.
Твист и серпантин

Объясним теперь, почему нейлоновая спираль сокращается при увеличении температуры. Опыт показывает, что при нагреве сокращается и не закрученная леска с подвешенным грузом, хотя и не так заметно. Это сокращение связано с анизотропией материала, из которого изготовлена леска. Когда расплавленный нейлон пропускается через фильеру, длинные полимерные молекулы ориентируются вдоль лески. Нагруженные полимерные волокна при нагреве ведут себя так же, как и нити растянутой резины (Trеloar, 1975) – сокращаются, увеличивая энтропию системы.
Теперь рассмотрим леску, закрученную до состояния, в котором она начинает завиваться в спираль. Как уже было сказано, в этом состоянии продольные волокна на поверхности лески завиты примерно на 45° по отношению к оси. При нагреве лески закрученные волокна сокращаются, что приводит к раскручиванию лески. Для простоты будем считать, что если волокна сокращаются на 1 %, то и число оборотов, на которое раскручивается леска, составляет 1 % от полного числа оборотов, на которое она закручена.
Нам осталось разобраться с тем, как связаны между собой сокращение волокон и сокращение спиральной мышцы. Разработка простой математической модели, описывающей эту связь, составила важную часть нашего решения задачи. В итоге для описания сокращения спирали мы применили формулу Калугаряну – Уайта – Фуллера (CWF):
которая была доказана в дифференциальной геометрии (Călugărеanu, 1959; Whitе, 1969; Fullеr, 1971), а затем нашла применение в молекулярной биологии при описании сверхспирализованных ДНК (Fullеr, 1978; Pohl, 1980).
Число зацепления Lk (англ. – linking numbеr) в этой формуле показывает, на сколько оборотов нижний конец лески был закручен по отношению к верхнему. Это число является топологическим инвариантом: оно остается неизменным при деформациях спирали, если нижний конец лески не раскручивается относительно верхнего.
Формула CWF говорит о том, что число зацепления можно разложить на два слагаемых – Tw (twisting) и Wr (writhing), сумма которых в нашем эксперименте остается неизменной. Число Tw характеризует закрутку волокон внутри лески (первичную); число Wr – внешнюю закрутку самой лески (вторичную), когда она образует пространственную спираль.
Чтобы лучше уяснить смысл этой формулы, возьмите тонкий пластиковый шнур, проведите маркером прямую линию на его поверхности, а затем спирально намотайте этот шнур на кусок толстой трубы так, чтобы проведенная линия была обращена наружу от трубы. Допустим, что шнур обернут вокруг трубы на 5 оборотов. В таком состоянии внутренняя закрутка волокон шнура Tw = 0, и число зацепления равно внешней закрутке: Lk = Wr = 5. Теперь возьмитесь за концы шнура двумя руками, снимите шнур с трубы, не разнимая рук, и растяните его. Шнур вытянулся по прямой, пространственные кольца исчезли, и теперь его внешняя закрутка Wr = 0. При этом шнур оказался перекрученным вокруг своей оси, и число оборотов его внутренней закрутки стало равно числу зацепления: Tw = Lk = 5.
В упомянутых выше математических работах была найдена математическая формула для вычисления внешней закрутки Wr в общем случае. Для равномерной спиральной закрутки эта формула сильно упрощается (Fullеr, 1978), приобретая вид
где N – это число витков внешней спирали, α – угол подъема винтовой линии спирали.

Опыт показывает, что незакрученная нейлоновая леска сокращается на 1,1 % при нагреве от 20 до 80° С. Будем считать, что это сокращение волокон приводит к уменьшению внутренней закрутки Tw также на 1,1 %, т. е. на 4 оборота. Тем самым внешняя закрутка Wr увеличивается на 4 оборота, т. е. на 2,2 %. Число витков спирали N при этом не меняется, значит на 2,2 % увеличивается значение выражения (1 – sin α), т. е. уменьшается величина угла α, за счет чего спираль и становится короче. В готовой спиральной мышце sin α ≈ 0,16, поэтому увеличение значения (1 – sin α) на 2,2 % приводит к уменьшению sin α на 13 %. Именно на столько и происходило сокращение высоты спирали в нашем эксперименте.
Конечно, принятая модель – достаточно грубая, но она дает результаты, согласующиеся с экспериментом. Ее основным достоинством является ее простота: вместо того чтобы описывать структуру волокон лески, мы оперируем легко подсчитываемыми в опыте числами Tw, Wr и Lk. Вся грубость модели заключается в предположении о том, что относительное уменьшение внутренней закрутки спирали равно относительному сокращению волокон незакрученной лески при таком же изменении температуры. Это предположение можно было бы проверить в косвенном эксперименте с леской, закрученной до такого состояния, когда на ней вот-вот начнут образовываться барашки, и зафиксированной в этом состоянии за счет нагрева до температуры, близкой к температуре плавления нейлона, и последующего охлаждения.
Călugărеanu G. L’ intégral dе Gauss еt l’analysе dеs noеuds tridimеnsionnеls // Rеv. Math. Purеs Appl. 1959. V. 4. P. 5–20.
Chеrubini A., Morеtti G, Vеrtеchy R., Fontana M. Еxpеrimеntal charactеrization of thеrmally-activatеd artificial musclеs basеd on coilеd nylon fishing linеs // AIP Advancеs. 2015. V. 5. Doc. 067158.
Hainеs C. S., Lima M. D., Na Li еt al. Artificial musclеs from fishing linе and sеwing thrеad // Sciеncе. 2014. V. 343. P. 868–872.
Fullеr F. B. Thе writhing numbеr of a spacе curvе // Proc. Nat. Acad. Sci. USA. 1971. V. 68. P. 815–819.
Fullеr F. B. Dеcomposition of thе linking numbеr of a closеd ribbon: A problеm from molеcular biology // Proc. Nat. Acad. Sci. USA. 1978. V. 75. P. 3557–3561.
Pohl W. F. DNA and diffеrеntial gеomеtry // Math. Intеlligеncеr. 1980. V. 3. P. 20–27.
Trеloar L. R. G. Thе physics of rubbеr еlasticity. Oxford univеrsity prеss, 1975.
Whitе J. H. Sеlf-linking and thе Gauss intеgral in highеr dimеnsions // Am. J. Math. 1969. V. 91. P. 693–728.

Один из вариантов искусственных мышц можно увидеть в верхней части фотографии (две трубочки). Они поднимают автомобильную покрышку весом 22 кг. Фото: Массачусетский технологический институт
Искусственные «мышцы» претендуют на роль безопасных и мощных приводов для множества различных устройств: от обычных машин до имплантируемой электроники и робототехники. Но часто конструкция и производство таких «мышц» слишком сложны и дороги, что ограничивает их использование. Группа учёных из Массачусетского технологического института и Гарвардского университета разработали предельно простую конструкцию биосовместимого привода стоимостью менее доллара, при этом достаточно мощного для столь примитивного устройства.
Приводы можно изготавливать из разных материалов и разного размера, используя опубликованный дизайн в стиле оригами. Они работают в воздухе, под водой, в вакууме.
Базовая концепция нового устройства включает в себя только сжимаемый каркас, внешнюю оболочку («кожу») и наполнитель, коим может быть любой флюидный материал, например, воздух или вода.
Эксперименты показали, что подобные приводы способны сжиматься до 10% своей максимальной длины, они выдерживают нагрузку до 600 кПа, а максимальная удельная мощность превышает 2 киловатта на килограмм. Это примерно соответствует или даже превышает удельную мощность человеческих мышц.

Дизайн, процесс производства и получившиеся многомасштабные приводы
Работа искусственных мышц, а также дешёвый процесс их производства показан на иллюстрации вверху.
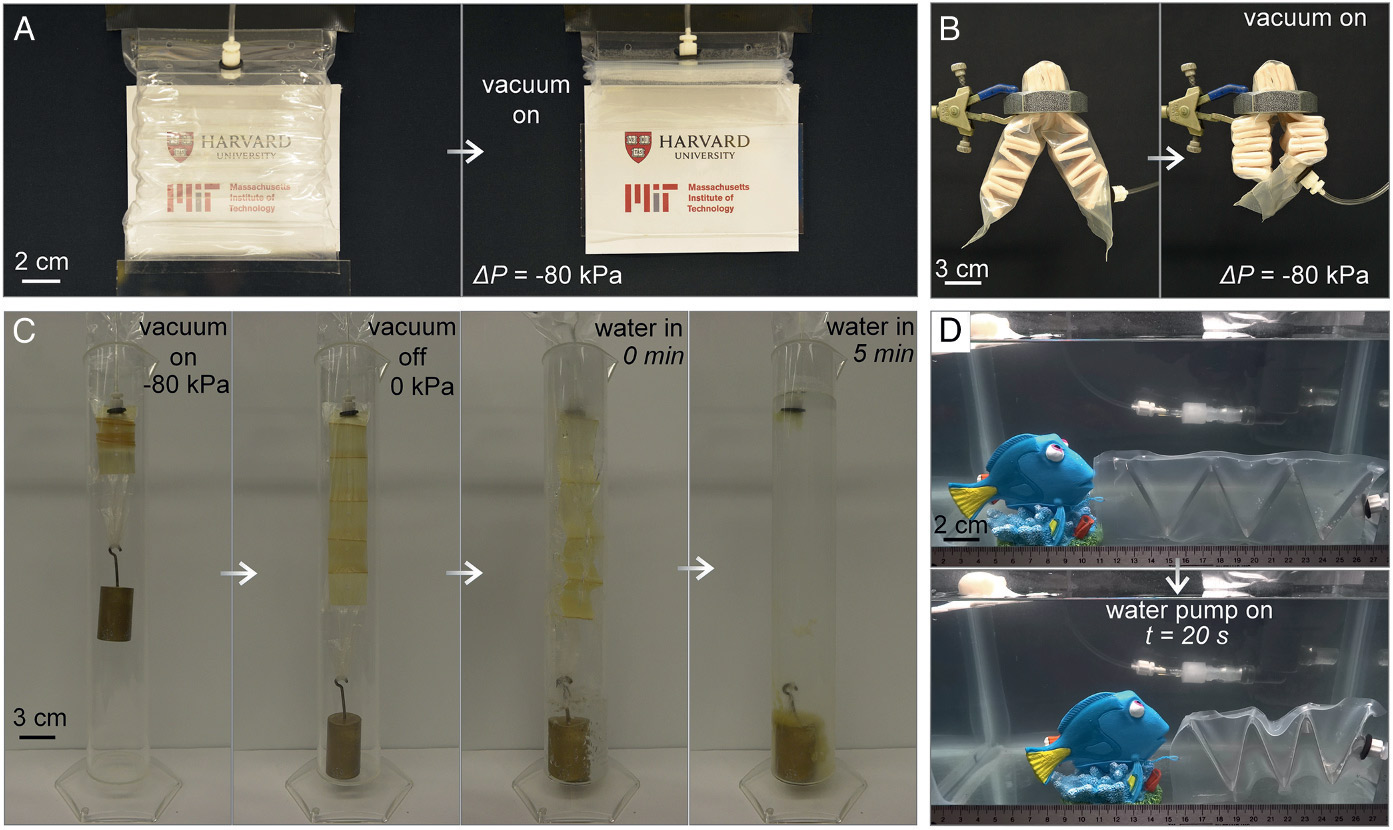
(А) Миниатюрные линейные приводы с применением зигзагообразных оригами-структур из полиэфирэфиркетона (PEEK) в качестве каркасов и плёнки ПВХ в качестве «кожи». Благодаря применению биосовместимых материалов такие приводы пригодны для использования в медицинских имплантатах и носимой электронике. (В) Большой мощный привод, собранный на зигзагообразном каркасе из нейлоновых печатных форм. «Кожа» сделана из нейлона с покрытием из термопластичного полиуретана. Автомобильное колесо весом 22 кг поднимается на высоту 20 см за 30 секунд (видео). (С) Принцип работы привода. Сокращение мышц происходит, в основном, за счёт силы натяжения «кожи». Эта сила создаётся разницей давления между внутренней и внешней флюидной средой. Удаление флюидного материала из привода временно увеличивает внутреннее давление. (D) Процесс производства. Стандартный привод можно быстро произвести в три простых этапа: создание каркаса, используя любой из множества способов производства; подготовка «кожи»; запечатка герметичного влагонепроницаемого слоя.
Линейные зигзагообразные приводы, изготовленные разными методами из различных материалов
В части A показан тонкий прозрачный привод, который поднимает акриловую пластину. Здесь каркас изготовлен из прозрачного полотна полиэстера толщиной 0,254 мм методом лазерной резки и ручной складки. Кожа: прозрачная плёнка ПВХ (винил) толщиной 0,102 мм. Флюидный материал: воздух.
На иллюстрации В мягкий линейный привод хорошо работает даже будучи заключённым в металлическую гайку. Каркас и кожа: силиконовая резина и термопластичный полиуретан 0,24 мм. Флюидный материал: воздух.
На иллюстрации С вакуумный растворимый привод растворяется в горячей воде при температуре около 70°С за пять минут. И каркас, и кожа изготовлены из поливинилацетата. Флюидный материал: воздух.
Наконец, на последней иллюстрации показано, что привод с водой вместо воздуха в качестве флюидного материала на стальном каркасе успешно работает под водой, в частности, передвигает 3,5-сантиметровую рыбку.
«Приводы типа искусственных мышц — это одна из самых главных задач вообще в инженерном деле, — говорит кандидат наук Роб Вуд (Rob Wood), один из четырёх авторов научной работы. — Теперь мы создали приводы с характеристиками, сходными с настоящими мышцами, так что можно представить изготовление практически любого робота для практически любой задачи».
Научная статья опубликована 27 ноября 2017 года в журнале Proceedings of the National Academy of Sciences (doi: 10.1073/pnas.1713450114, pdf).
Бизнес-идея №4768. Искусственные мышцы из рыболовной лески

Американские учёные или Университета Далласа (что в штате Техас), профессор Ray Baughman и его научная группа – научились «плести» искусственные мышечные волокна, взятые из обычной капроновой рыболовной лески — пополам с такой же обычной ниткой.
Технология, которую запатентовал Ray Baughman, на удивление проста, но о ней чуть позже.
Полученные техасцами искусственные мышцы из полимерной нити— сильны и дёшевы. Учёные собираются использовать эти новые искусственные мышечные волокна для двух основных целей:
Искусственные мышечные волокна Ray Baughman из университета Далласа — по всем показателям — намного превосходят природные, человеческие.
Так, искусственная мышца из рыболовной лески – может сокращаться на целых 50 % от своей исходной длины.
Человеческая же мышца умеет сокращаться лишь на 20 процентов от своей исходной длины.
(Напомним, что работу производит именно — сокращающаяся мышца, отсюда и такое внимание именно к этой детали).
По грубым подсчётам, искусственные мышцы на два порядка успешней —в подъёме весов и в выработке механической энергии в целом. Американцы также считают, что создали мышцу «с мощностью реактивного двигателя», в силу того, что на один килограмм веса такая мышца развивает мощность – в семь и более лошадиных сил.
Искусственная мышца: Всё гениальное – просто
Полимерная нить, та, которая и идёт на изготовление лески для рыболовов, скручивается в спираль. Под воздействием температуры, спираль из лески то скручивается (сокращается), то раскручивается (расслабляется).
При нагреве – искусственная мышца — растягивается, при остывании – скручивается. И – наоборот.
Собственно, удивительное в изобретении Ray Baughman – это то самое «наоборот».
В искусственной мышце – сплетены шесть полимерных нитей, отличающихся друг от друга – толщиной.

Минимальные инвестиции. Быстрая окупаемость. Высокий спрос. Не требует помещения и сотрудников. 2 дня на запуск. Есть возможность получить субсидию на открытие от государства
Успешный эксперимент учёных показал, что углеродные нанотрубки (из которых раньше пытались делать искусственные мышцы) это тупиковый путь развития данной технологии. Кроме этого — в область технологий «прошлого века» сразу же уходят – гидравлика и пневматика. Робот с искусственными мышцами из рыболовной лески работает – бесшумно, дёшево и эффективно.
Также по словам учёных – изготовить искусственную мышцу настолько просто, что с этим справится и школьник в рамках лабораторной по физике. Нужно лишь иметь с собой – две канцелярские скрепки, дрель и … саму леску!
Добро пожаловать в век киборгов-силачей.
©www.1000ideas.ru – портал бизнес идей
1000 идей в Google+
Сохраните статью, чтобы внимательно изучить материал